Page 16 - untitled
P. 16
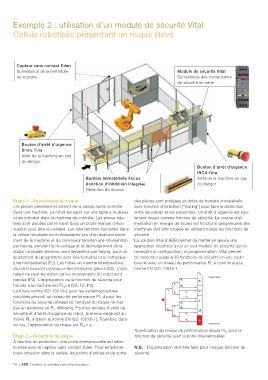
Exemple 2 : utilisation d’un module de sécurité Vital
Cellule robotisée présentant un risque élevé
Capteur sans contact Eden
Surveillance de la fermeture Module de sécurité Vital
de la porte Surveillance des composants
de sécurité en série
Bouton d’arrêt d’urgence
Smile Tina
Arrêt de la machine en cas
de danger
Bouton d’arrêt d’urgence
INCA Tina
Barrière immatérielle Focus Arrêt de la machine en cas
(fonction d’inhibition intégrée) de danger
Détection d’intrusion
Étape 1 – Appréciation du risque des pièces sont protégés et dotés de barrière immatérielle
Les pièces pénètrent et sortent de la cellule après contrôle avec fonction d’inhibition ("muting") pour faire la distinction
dans une machine. Le robot les saisit sur une table à rouleaux entre les pièces et les personnes. Un arrêt d’urgence est éga-
et les introduit dans la machine de contrôle. Les pièces reje- lement requis comme fonction de sécurité. La source d’ali-
tées sont placées par le robot dans un poste manuel d’éva- mentation en énergie de toutes les fonctions dangereuses des
cuation pour être ré-usinées. Les interventions humaines dans machines doit être coupée en utilisant toutes les fonctions de
la cellule robotisée sont nécessaires lors d’un dysfonctionne- sécurité.
ment de la machine et du convoyeur (environ une intervention La solution Vital d’ABB permet de mettre en œuvre une
par heure), pendant le ré-usinage et le déchargement de la application robotisée avec un seul module de sécurité qui ne
station manuelle (environ une intervention par heure), pour un nécessite ni configuration, ni programmation. Vital permet
ajustement du programme (une fois/semaine) et le nettoyage de raccorder jusqu’à 30 fonctions de sécurité en une seule
(une fois/semaine) (F2). Les mises en marche intempestives boucle avec un niveau de performance PL e conforme à la
du robot peuvent provoquer des blessures graves (S2). L’opé- norme EN ISO 13849-1.
rateur ne peut les éviter car les mouvements du robot sont PL r
Risque faible
rapides (P2). L’appréciation de la fonction de sécurité pour P 1 a
l’accès à la machine est PL =e (S2, F2, P2). F 1 P 2
r
La future norme ISO 10218-2 pour les systèmes/cellules S 1 b
F 2 P 1
robotisés prescrit un niveau de performance PL d pour les P 2
c
fonctions de sécurité utilisées (si l’analyse du risque ne met P 1
pas en évidence un PL différent). Pour les entrées d’arrêt de F 1 P 2
S 2
d
sécurité et d’arrêt d’urgence du robot, le niveau exigé est au P 1
F 2
moins PL d (selon la norme EN ISO 10218-1). Toutefois, dans P 2 e
ce cas, l’appréciation du risque est PL = e. Risque élevé
r
Appréciation du niveau de performance requis PL pour la
r
Étape 2 – Réduction du risque fonction de sécurité avec la porte interverrouillée
À des fins de protection, une porte interverrouillée est sélec-
tionnée avec le capteur sans contact Eden. Pour empêcher N.B. : L’appréciation doit être faite pour chaque fonction de
toute intrusion dans la cellule, les points d’entrée et de sortie sécurité.
14 | ABB Produits et solutions sécurité machines