Page 17 - untitled
P. 17
B1
Focus avec Tina 10A
B5
Eden
K1
Vital
S1
Inca Tina
B2
Focus avec Tina 10A
S2
Smile Tina
B4 B3
Focus avec Tina 10A
Focus avec Tina 10B
et unité d’inhibition et unité d’inhibition
MF-T
MF-T
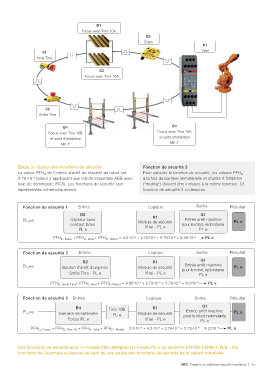
Étape 3 - Calcul des fonctions de sécurité Fonction de sécurité 3
La valeur PFH de l’entrée d’arrêt de sécurité du robot est Pour calculer la fonction de sécurité, les valeurs PFH
D
D
-8
5.79·10 (valeur s’appliquant aux robots industriels ABB avec à la fois de barrière immatérielle et d’unité d’inhibition
baie de commande IRC5). Les fonctions de sécurité sont ("muting") doivent être incluses à la même fonction. Cf.
représentées schématiquement. fonction de sécurité 3 ci-dessous.
Fonction de sécurité 1 Entrée Logique Sortie Résultat
B5 Q1
K1
PL =e Capteur sans Module de sécurité Entrée arrêt machine PL e
r
contact Eden Vital - PL e pour le robot, redondante
PL e PL e
-9
PFH + PFH D, Vital + PFH D, Robot = 4.5·10 + 2.74·10 + 5.79·10 = 8.98·10 -8 PL e
-8
-8
D, Eden
Fonction de sécurité 2 Entrée Logique Sortie Résultat
Q1
S2 K1
PL =e Entrée arrêt machine
r Bouton d’arrêt d’urgence Module de sécurité PL e
pour le robot, redondante
Smile Tina - PL e Vital - PL e PL e
PFH D, Smile Tina + PFH D, Vital + PFH D, Robot = 4.66·10 + 2.74·10 + 5.79·10 = 9.0·10 -8 PL e
-8
-8
-9
Fonction de sécurité 3 Entrée Logique Sortie Résultat
B4 Tina 10B K1 Q1
Entrée arrêt machine
PL =e barrière immatérielle PL e Module de sécurité pour le robot, redondante PL e
r
Focus PL e Vital - PL e PL e
-8
-9
-9
PFH + PFH D, Tina 10 + PFH , + PFH , = 2.5·10 + 4.5·10 + 2.74·10 + 5.79·10 = 9.2310 -8 PL e
-8
D Vital
D Robot
D, Focus
Ces fonctions de sécurité avec le module Vital atteignent le niveau PL e de la norme EN ISO 13849-1. N.B. : les
fonctions de l’exemple ci-dessus ne sont qu’une partie des fonctions de sécurité de la cellule robotisée.
ABB Produits et solutions sécurité machines | 15