Page 18 - untitled
P. 18
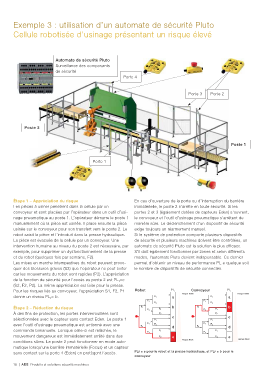
Exemple 3 : utilisation d’un automate de sécurité Pluto
Cellule robotisée d’usinage présentant un risque élevé
Automate de sécurité Pluto
Surveillance des composants
de sécurité
Porte 4
Porte 3 Porte 2
Poste 2
Poste 1
Porte 1
Étape 1 – Appréciation du risque En cas d’ouverture de la porte ou d’interruption du barrière
Les pièces à usiner pénètrent dans la cellule par un immatérielle, le poste 2 s’arrête en toute sécurité. Si les
convoyeur et sont placées par l’opérateur dans un outil d’usi- portes 2 et 3 (également dotées de capteurs Eden) s’ouvrent,
nage pneumatique au poste 1. L’opérateur démarre le poste 1 le convoyeur et l’outil d’usinage pneumatique s’arrêtent de
manuellement où la pièce est usinée. Il place ensuite la pièce manière sûre. Le déclenchement d’un dispositif de sécurité
usinée sur le convoyeur pour son transfert vers le poste 2. Le exige toujours un réarmement manuel.
robot saisit la pièce et l’introduit dans la presse hydraulique. Si le système de protection comporte plusieurs dispositifs
La pièce est évacuée de la cellule par un convoyeur. Une de sécurité et plusieurs machines doivent être contrôlées, un
intervention humaine au niveau du poste 2 est nécessaire, par automate de sécurité Pluto est la solution la plus efficace.
exemple, pour supprimer un dysfonctionnement de la presse S’il doit également fonctionner par zones et selon différents
et du robot (quelques fois par semaine, F2). modes, l’automate Pluto devient indispensable. Ce dernier
Les mises en marche intempestives du robot peuvent provo- permet d’obtenir un niveau de performance PL e quelque soit
quer des blessures graves (S2) que l’opérateur ne peut éviter le nombre de dispositifs de sécurité connectés.
car les mouvements du robot sont rapides (P2). L’appréciation
de la fonction de sécurité pour l’accès au poste 2 est PL =e
r
(S2, F2, P2). La même appréciation est faite pour la presse.
Pour les risques liés au convoyeur, l’appréciation S1, F2, P1 Robot PL r Convoyeur PL r
Risque faible Risque faible
donne un niveau PL = b. P 1 a P 1 a
r
F 1 F 1
P 2 P 2
Étape 2 – Réduction du risque S 1 P 1 b S 1 P 1 b
F 2 F 2
À des fins de protection, les portes interverrouillées sont P 2 P 2
c c
sélectionnées avec le capteur sans contact Eden. Le poste 1 P 1 P 1
avec l’outil d’usinage pneumatique est actionné avec une F 1 P 2 F 1 P 2
d S 2 d
S 2
commande bimanuelle. Lorsque celle-ci est relâchée, le F 2 P 1 F 2 P 1
mouvement dangereux est immédiatement arrêté dans des P 2 e P 2 e
Risque élevé Risque élevé
conditions sûres. Le poste 2 peut fonctionner en mode auto-
matique lorsqu’une barrière immatérielle (Focus) et un capteur
sans contact sur la porte 4 (Eden) en protègent l’accès. PLr = e pour le robot et la presse hydraulique, et PLr = b pour le
convoyeur
16 | ABB Produits et solutions sécurité machines